Home
About this Website
Mind perception offers a useful framework for studying human-robot interaction. On this website, we present mind perception scores for a wide range of different robots. We sincerely thank the ABOT Database Team for making a repository of standardized, high-quality images of anthropomorphic robots publicly available. Researchers interested in specific aspects of anthropomorphism are encouraged to consult the ABOT Database Team's work ABOT Website and accompanying publication ABOT Publication. Below you can find the definitions we used to acquire the mind perception scores.
Glossary
- Mind Perception
- Mind perception refers to the capacity to attribute a mind to other beings or even non-living entities and, according to H. M. Gray et al. (2007), is conceptualized along two dimensions: Agency and Experience.
- Agency
- Agency is the capacity to plan and act.
- Experience
- Experience is the capacity to feel and sense.
- Capacity to act
- Acting in this context is defined as being able to do something for a particular purpose.
- Capacity to feel
- Feeling in this context is defined as being able to experience something emotional.
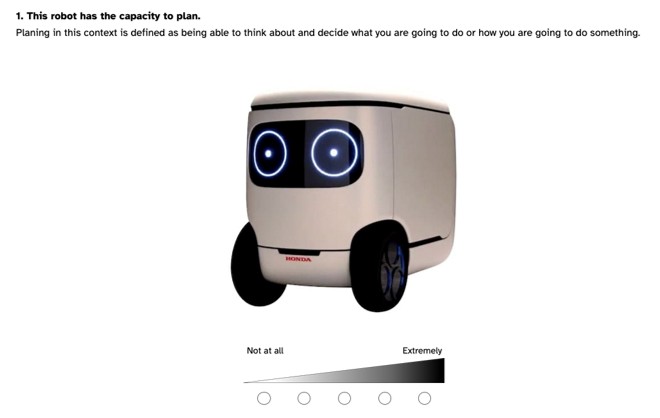
- Capacity to plan
- Planning in this context is defined as being able to think about and decide what you are going to do or how you are going to do something.
- Capacity to sense
- Sensing in this context is defined as being able to recognize something, especially any of the five physical abilities see, hear, smell, taste, and feel.
Background
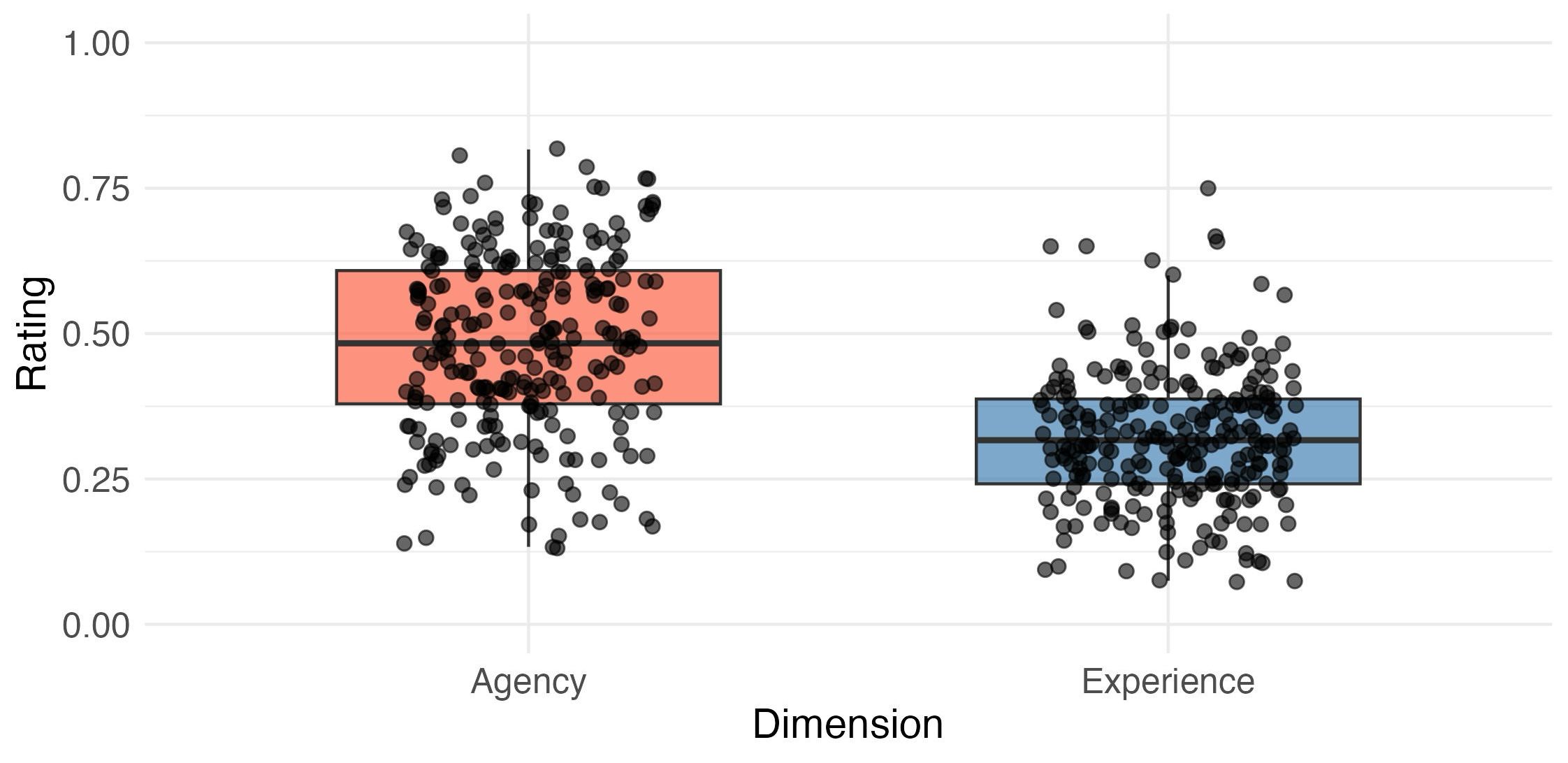
Social robots are increasingly deployed in everyday contexts, yet they often fail to elicit social cognition in ways comparable to human interaction partners. In our work "Wall-E vs. Terminator: The relationship between physical appearance and dimensions of mind perception", we systematically examined how physical robot features shape mind perception, defined along the dimensions of agency (capacity to act and plan) and experience (capacity to sense and feel). Using standardized images of all 251 robots currently included in the Anthropomorphic Robot Database (ABOT), we collected agency and experience ratings from 300 participants from English-speaking countries all worldwide (30 ratings per robot and dimension).
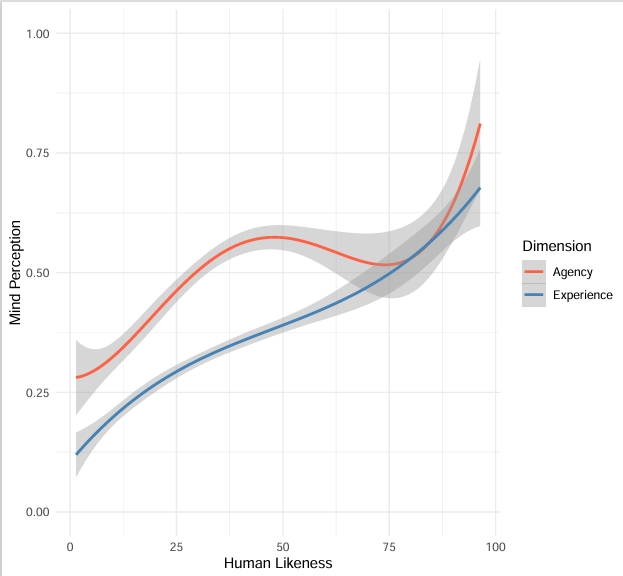
To quantify the contribution of individual appearance dimensions, we applied stepwise regression analyses with body, face, and surface features as continuous predictors of agency and experience ratings, including interaction terms to capture non-additive effects and selecting best-fitting models based on adjusted R² and nested F-tests. Replicating prior findings, robots were generally perceived as higher in agency than in experience. Perception of agency was best explained by body components, particularly in interaction with facial features, whereas experience was explained by a combination of body components, facial features, and surface details. Increasing human-likeness enhanced both dimensions, but with distinct nonlinear trajectories: experience plateaued at medium levels of human-likeness, while agency showed a pronounced dip at high human-likeness, consistent with an uncanny-valley-like pattern.
The resulting database of item-wise and dimension-wise scores for each individual robot can be found on this interactive website, which lets researchers search, filter, and select robots by empirically grounded agency and experience ratings, as well as participants' characteristics, turning design choices into controllable experimental variables.